思派尔全国服务热线:0510-85213892 13338104955(微信同号)

思派尔智能科技有限公司
手 机:13338104955
邮 箱:skr@autozcjm.com
电 话:0510-85213892
传 真:0510-81819120
地 址:无锡新吴区金马路12号

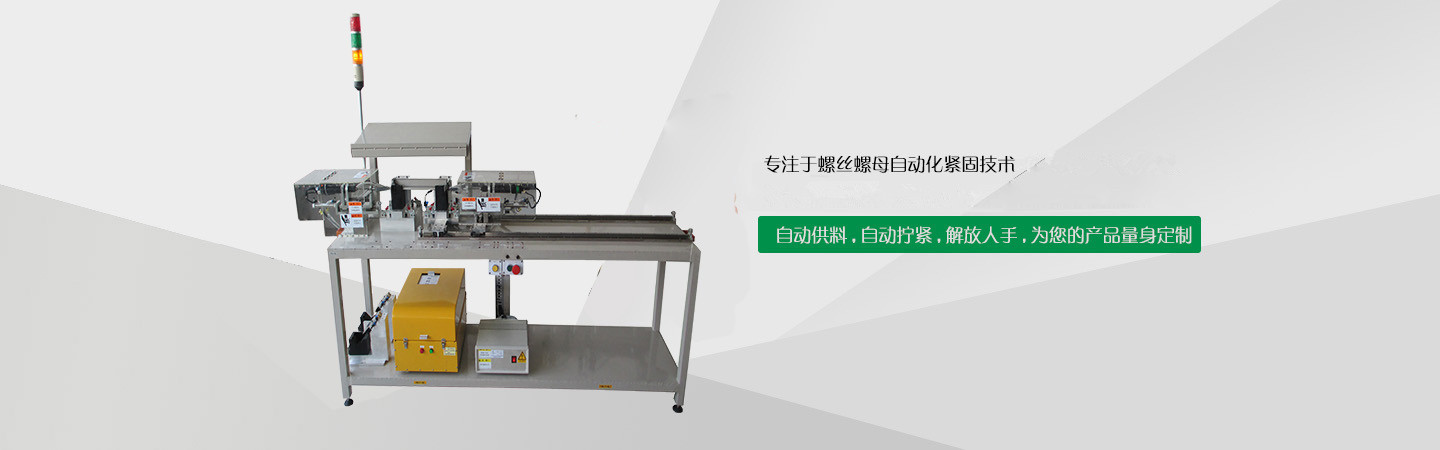
机能:
1.具有通用光耦1/0输入、输出端口;机器人编程参数设置。
2.搭载自动机用螺丝刀,实现扭力管理。可以精密对应小螺丝,确保产品品质稳定。
3.专用的锁螺丝程序,对应不同的锁螺丝条件。可实现螺丝上浮、空转、螺丝拾取报警和扭力到位信号输出。
4.螺钉送料器配有传感器,检测螺钉是否传送到位和有无,把信号传送给机器人。
|
名称 |
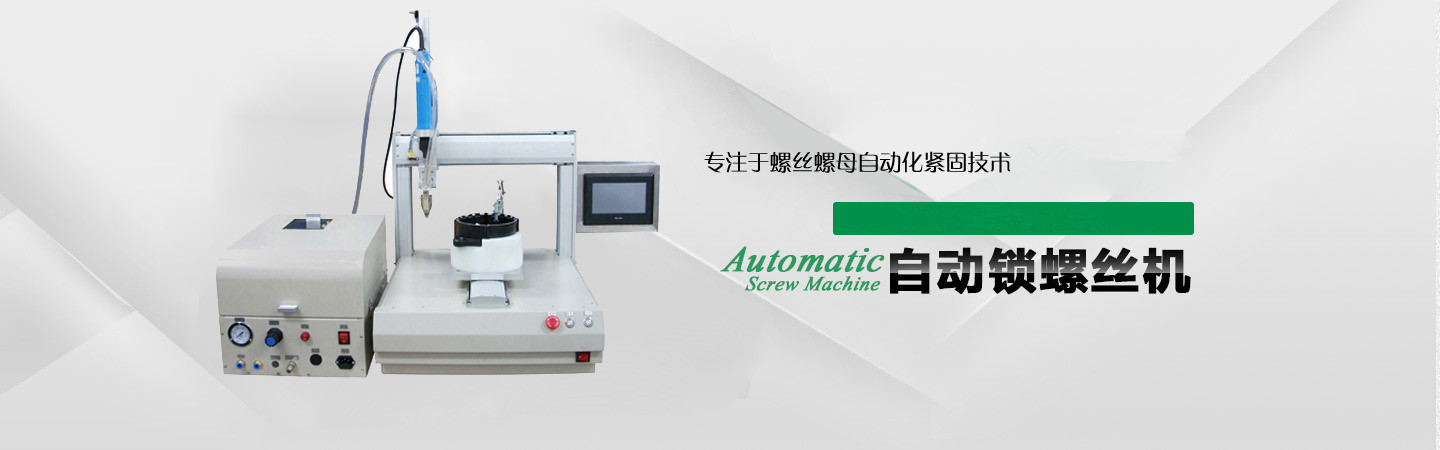
锁螺丝台式机器人 |
|
机器人轴数 |
三轴 |
|
动作范围 |
200*200mm-500*500mm |
|
重复定位精度 |
±0.01mm |
|
存储容量 |
64个程序;一个程序1800个点 |
|
适应螺丝直径 |
M1mm-M5mm |
|
使用扭力 |
0.03N·M-4N·M |
|
回吸气消费量 |
65l/min |
|
电源 |
AC200V-250V |
|
消费电量 |
600VA |
|
驱动方式 |
精密步进马达 |
|
传动方式 |
XY轴步进电机+同步带,Z轴滚珠丝杆 |
|
本体尺寸 |
418*478*627(mm) |
|
重量 |
25kg |
|
输入输出 |
输入16/输出16 |
操作流程:
1.把螺丝刀及固定治具、螺丝刀控制盒、螺丝供料器、1/0线按要求装配固定好;
2.调整减压阀气压控制真空回吸大小及真空传感器1/0输出,调整螺丝刀吸嘴与螺丝送钉器供钉点的位置;
3.利用教导盒调整锁螺丝的坐标位置,根据螺丝和螺丝刀的转速设置机器人锁螺丝的条件;
4.利用教导盒调整设置螺丝拾取点位置和参数;
5.保存设置,运行设备。